Markov Chain Monte Carlo
Transition Distribution
Markov Chain에서와 동일한 예시를 사용하였다.
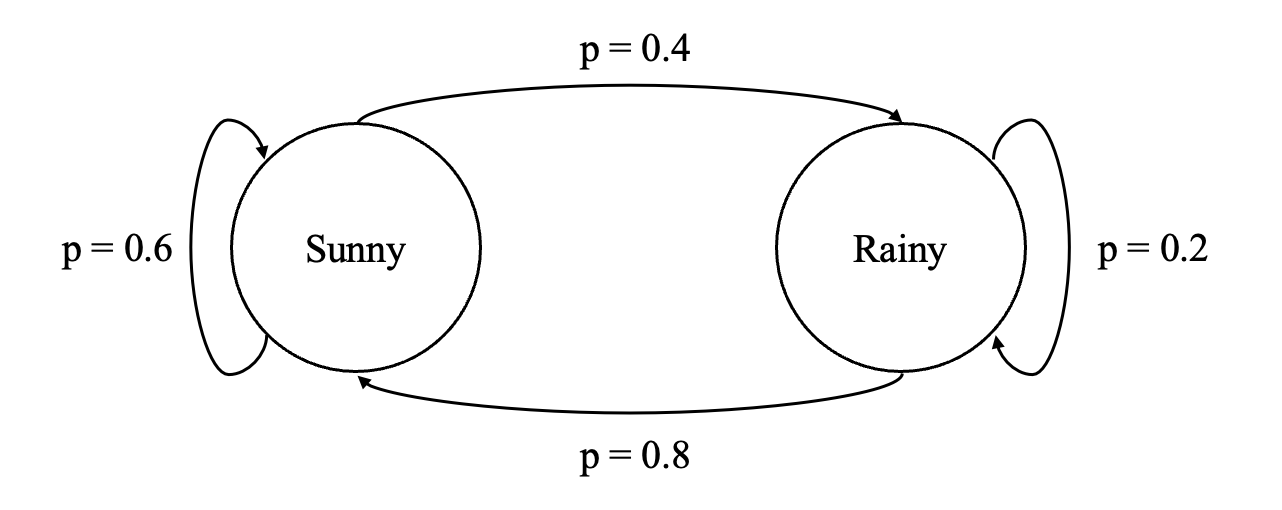
위 예시의 Markov chain이 가지는 Transition matrix는
와 같고, 이때 Transition distribution 는
이다.
Stationary distribution
위의 Transition matrix 에 대해 를 만족시키는, 즉 Transition을 거쳐도 변화가 없는 상태를 Stationary distribution 이라고 한다.
위 Transition matrix에 대해 stationary distribution은 이다.
( 를 여러 번 곱하다보면 더이상 변하지 않게 되는 상태를 의미하는 Steady-state과 유사)
Detailed Balance
Detailed balance는 두 state 를 오가는 확률이 서로 동일함을 의미한다.
즉 두 state에 대하여 특정 state에 있을 확률과 그 state에서 다른 state로 이동할 확률이 서로 같음을 의미한다.
Detailed balance가 만족될 경우 Stationary distirubtion의 존재가 보장된다.
Metropolis-Hastings
MH 알고리즘의 목적은 Markov Process를 디자인하는 것이다.
Stationary distribution이 target distribution 이 되는 Markov chain을 찾는 것을 목표로 한다.
-
target distribution 가 있고
-
proposal distribution 를 도입. 시점의 state 로부터 다음 시점의 state 를 제안한다. 가령 정규 분포 를 사용할 수 있다.
-
Acceptance distribution 를 정의한다. 가 accept될 확률을 의미한다.
-
그렇다면 , 즉 state 에서 state 로 넘어갈 확률은 (state 에서 state 를 제안할 확률) * (acceptance의 확률) 이라는 관계가 생긴다.
-
Transition distribution 는 항상 알고 있는 것이 아니므로 위 detailed balance 식을 이용해 제거한다.
Acceptance distribution들에 대해 정리하면
(Metropolis 알고리즘은 symmetric transition matrix를 가정하므로 이기 때문에 로 쓴다.)
이제 위 식이 성립하도록 acceptance distribution을 정하면 된다. 이때 주로 사용되는 방법은 Metropolis choice:
이렇게 acceptance distribution을 정의하면, 나 중 하나는 1이 된다.
- , 즉 새로 제안된 state의 likelihood가 직전 state의 likelihood보다 크면 .
- , 즉 새로 제안된 state의 likelihood가 직전 state의 likelihood보다 작으면 .
샘플링 원리
- 를 샘플링 후 와 비교하여, 이면 accept, 아닐 경우에는 reject한다.
- , 즉 새로 제안된 state의 likelihood가 직전 state의 likelihood보다 클수록 이 될텐데, 이 경우에는 이니 새로 제안된 state가 항상 accept된다.
- , 즉 새로 제안된 state의 likelihood가 직전 state의 likelihood보다 작을수록 이 되고, 이 경우에는 이니 값을 acceptance probability로 가진다.
비대칭성 보정
- 뒤의 항 을 통해 proposal distribution의 비대칭에 대한 보정이 이루어진다.
- 예를 들어 라면, 애초에 proposal distribution은 다음에 를 제안할 가능성이 (그 반대에 비해 상대적으로) 높다.
- 하지만 에 를 곱하기 때문에, acceptance probability를 감소시키는 방식으로 proposal distribution의 비대칭성을 고려한다.
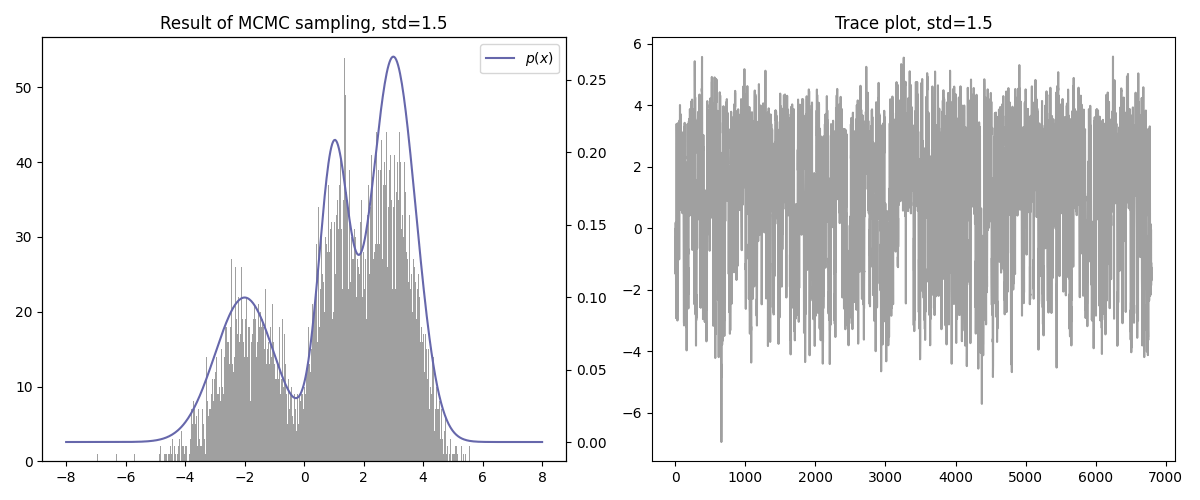
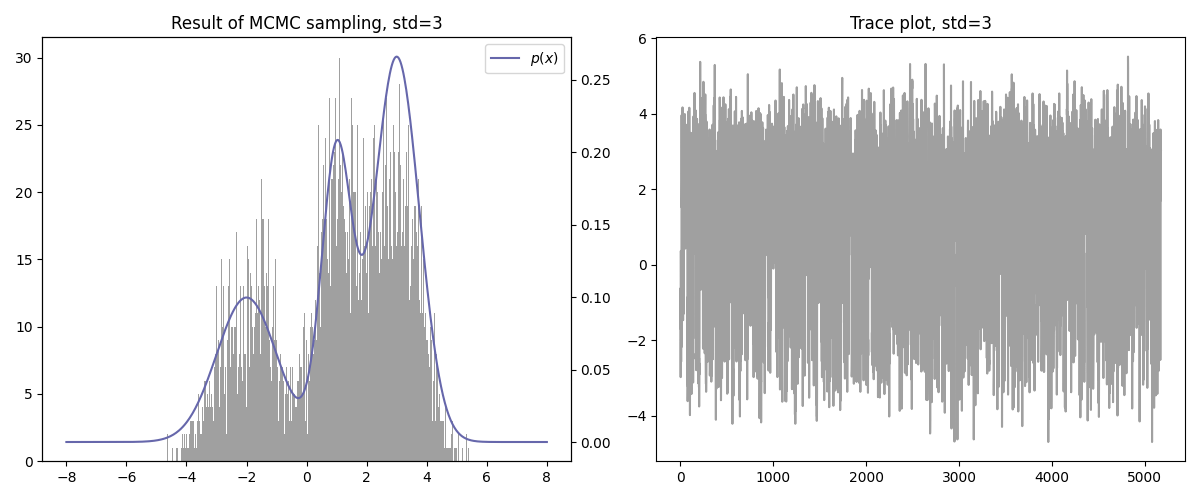
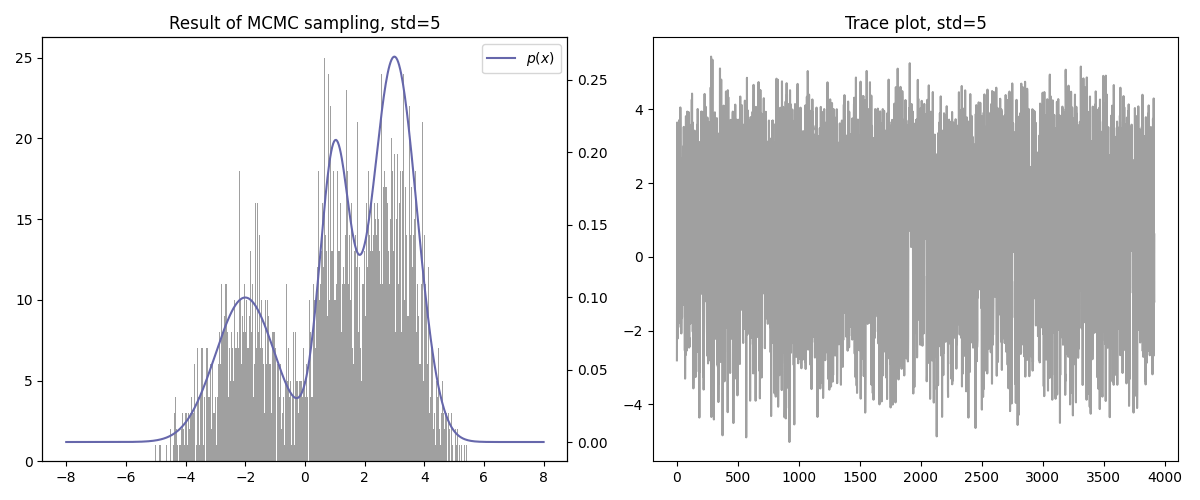
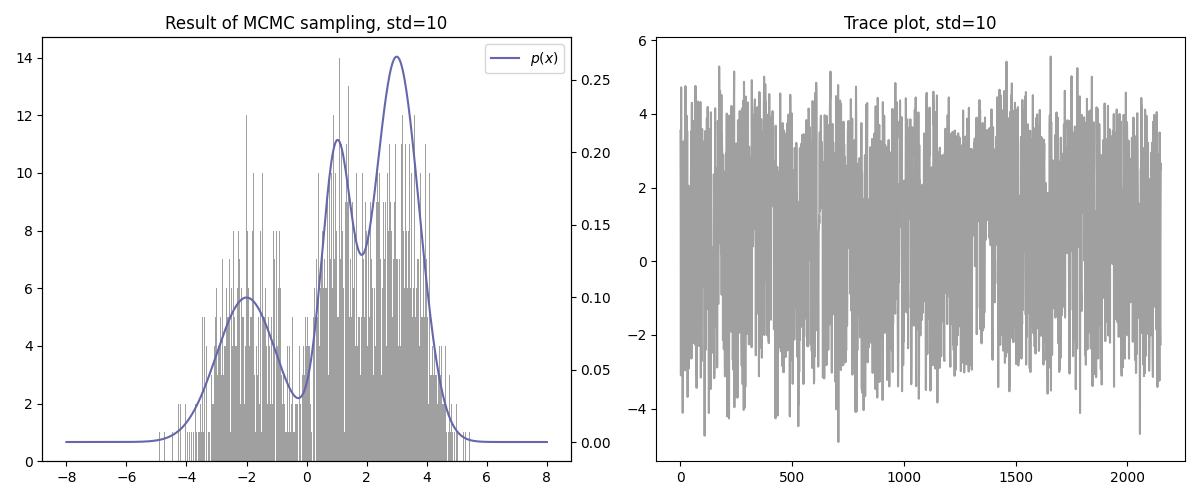
예시
import numpy as np
import matplotlib.pyplot as plt
def target_distribution(x):
return 0.5 * np.exp(-0.5 * ((x - 3) / 0.75) ** 2) / (0.75 * np.sqrt(2 * np.pi)) + \
0.25 * np.exp(-0.5 * ((x - 1) / 0.5) ** 2) / (0.5 * np.sqrt(2 * np.pi)) + \
0.25 * np.exp(-0.5 * ((x + 2) / 1.0) ** 2) / (1.0 * np.sqrt(2 * np.pi))
def proposal_distribution(x_prev, std):
return np.random.normal(x_prev, std)
SEED = 100
N = 10000
STD = 1.5
np.random.seed(SEED)
if __name__ == "__main__":
data_x_accepted = []
x_prev = 0
for i in range(N):
u = np.random.uniform(0, 1)
target = target_distribution(x_prev)
x_proposal = proposal_distribution(x_prev, STD)
p_x_star = target_distribution(x_proposal)
p_x = target_distribution(x_prev)
acceptance_probability = min(1, p_x_star/p_x)
if u <= acceptance_probability:
data_x_accepted.append(x_proposal)
x_prev = x_proposal
# Plot histogram and sampled data
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
axes[0].set_title(f"Result of MCMC sampling, std={STD}")
axes[1].set_title(f"Trace plot, std={STD}")
axes[0].hist(data_x_accepted, bins=500, color="gray", alpha=0.75)
ax1_2 = axes[0].twinx()
x = np.linspace(-8, 8, 500)
y_1 = target_distribution(x)
ax1_2.plot(x, y_1, color="#6667ab", label=r"$p(x)$")
x2 = np.arange(1, len(data_x_accepted)+1)
axes[1].plot(x2, data_x_accepted, color="gray", alpha=0.75)
# Visualize
plt.legend()
plt.tight_layout()
plt.savefig(f'./result_std_{str(STD).replace(".", "_")}.png')
plt.show()
기타
- 수렴 속도가 빠른 편이다.
- Curse of dimensionality는 여전히 존재한다.
2025.01.20
Reference
https://infossm.github.io/blog/2019/01/11/mcmc/
https://en.wikipedia.org/wiki/Metropolis–Hastings_algorithm#Formal_derivation
https://harang3418.tistory.com/12