고등학교 미적분 교과서에서 처음 접했던 음함수이다. 정의를 찾아보면 relation으로(...) 정의된다.
y=f(x1,...) 와 같이 explicit하게 하나의 변수가 다른 변수들로 표현되는 Explicit function과 달리, F(x1,x2,...)=0 처럼 특정한 하나의 변수가 그 외의 변수들로 표현되어있지 않은 형태의 함수를 Implicit function이라 한다.
Implicit Function Theorem
이변수함수의 경우만 살펴보면, Implicit function f(x,y)=0 가 정의되어 있고 (x0,y0) 에서 미분 가능하며 ∂y∂f(x0,y0)=0 일 때, 다음을 만족하는 함수 h 가 unique하게 존재한다.
h(x0)=y0
x0 의 neighborhood에서 f(x,h(x))=0
이변수함수이므로 그 의미는, 음함수에서 기울기가 수직인 부분을 제외하고는y 를 x 에 대한 함수로 나타낼 수 있다고 생각해볼 수 있다.
예를 들어 f(x,y)=x2+y2−1=0 에 대해 h(x)=1−x2 를 사용해 y>0 에 대해f(x,h(x))=0 로 나타낼 수 있으나, x=1,−1 에서는 h(x) 가 정의되지 않는다.
무차별곡선의 MRS처럼 함수의 기울기를 구해야 하는 경우라면
df=∂x∂fdx+∂y∂fdy=0⋯(*)
⇔dxdy=−∂y∂f∂x∂f
⇔dxdy=−yx
와 같이 h′(x) 에 해당하는 함수를 구할 수 있다. (*)와 같이 쓸 수 있는 이유는, f(x,y) 의 값은 항상 0이니 df=0 이라 둘 수 있기 때문이다.
참고로 (*)의 양변을 dx 로 나누면 고등학교 미적분 교과서에서 나오던 음함수의 미분법 과 같은 계산이 된다.
(석사 첫 학기 미시경제 시간에) 이 음함수에 대해 배우다가, 다변수함수에 chain rule을 적용하는 계산에 대해 돌아보았다.
Total derivative
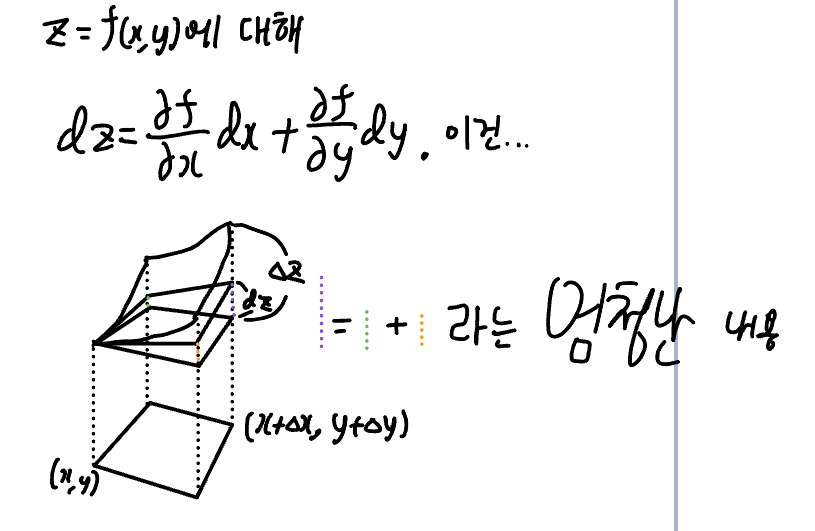
학부 전공을 바꾼 첫 해였던 2023년에 이런 내용을 정리했던 적이 있다.
함수 f(x1,...) 에 대해 total derivative df 는 다변수함수의 변화량을 tangent plane으로 linear approximation한 값과 같다.
하나 더 나아가서 각 xi 가 다른 변수들의 함수인 경우로 넘어가면 chain rule이 필요해진다.
Case 1: f(x1,x2),x1=g(t,s),x2=h(t,s)
지금까지 본 것 중에는 가장 general한 케이스이다. f 를 t,s 에 대하여 df 를 구하면
df=∂t∂fdt+∂s∂fds⋯(*)
이다. 이중 ∂t∂f 에 먼저 chain rule을 적용하여 풀어쓰려면, f(x1,x2) 의 독립변수인 x1 과 x2 가 모두 t 를 독립변수로 가지는 함수이니
∂t∂f=∂x1∂f∂t∂g+∂x2∂f∂t∂h
와 같이 정리할 수 있다. ∂s∂f 에도 동일하게 적용할 수 있고, 이를 모두 정리하여 (*)에 대입하면